Design
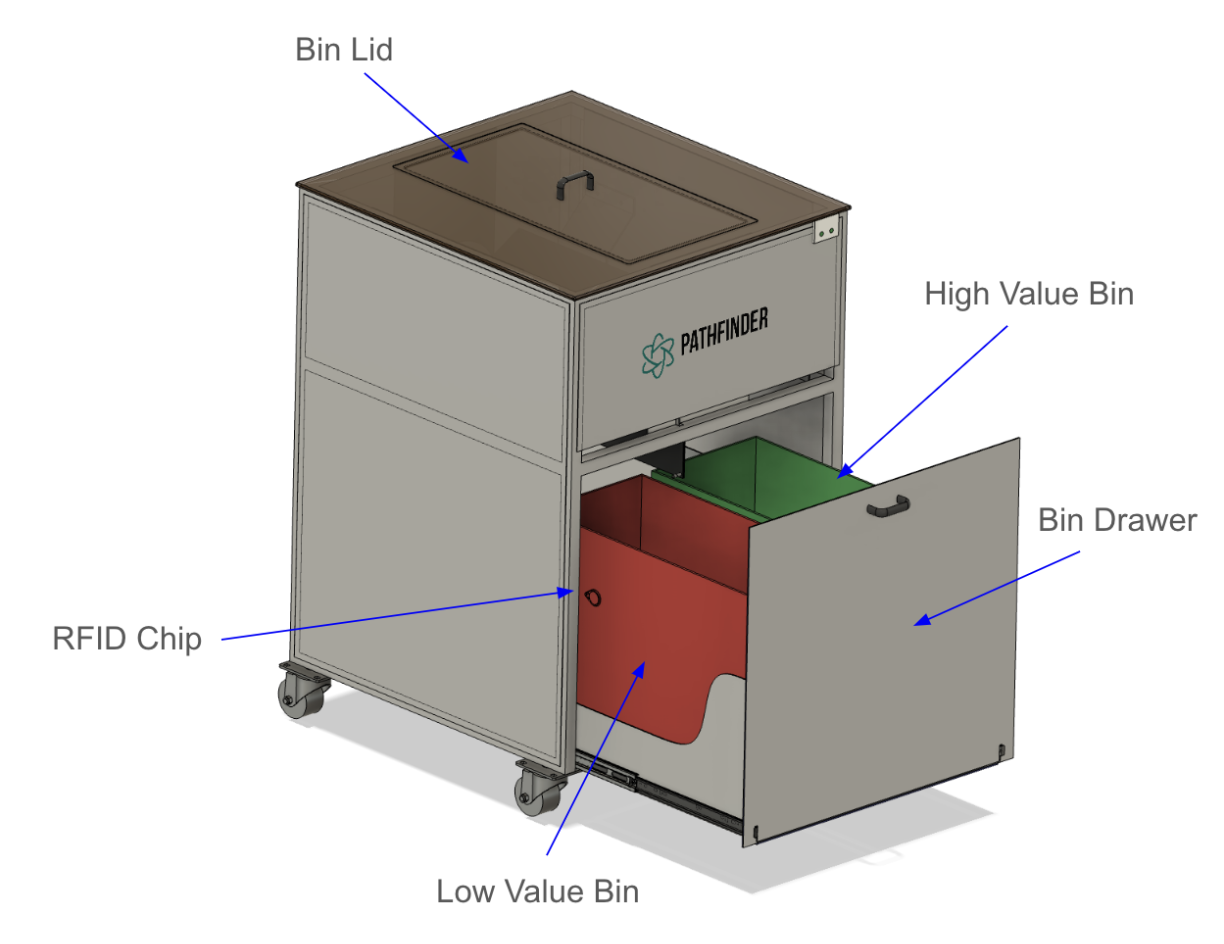
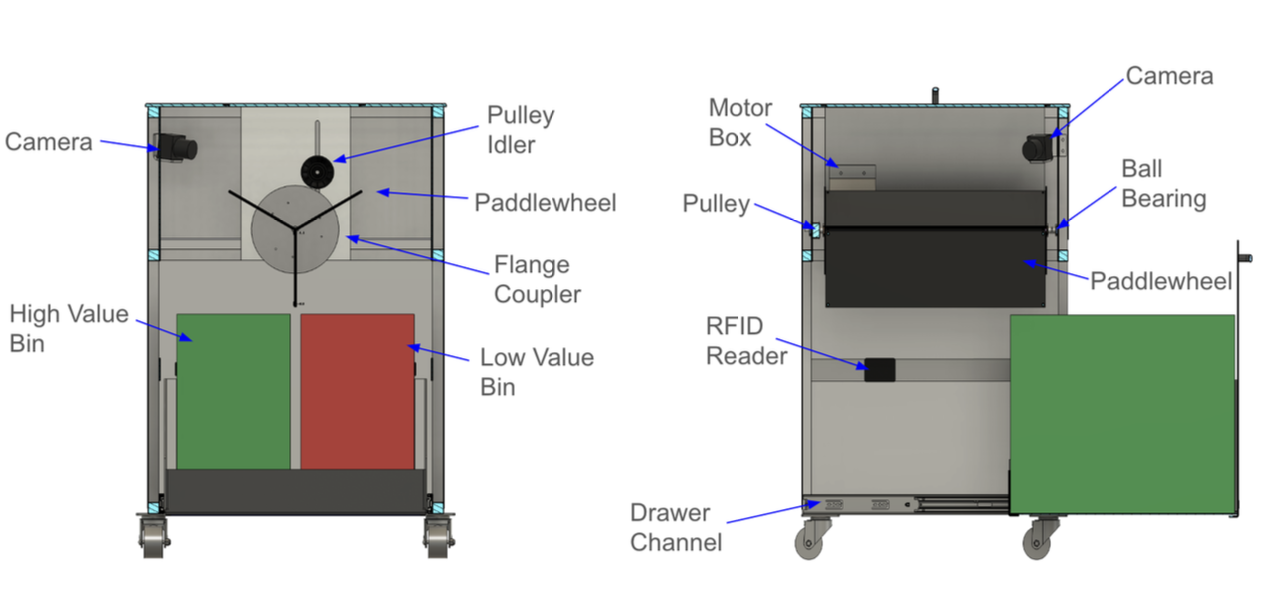
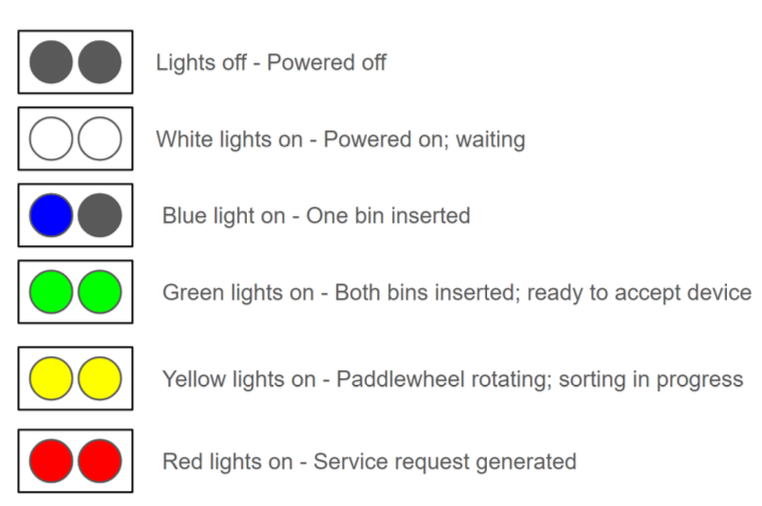
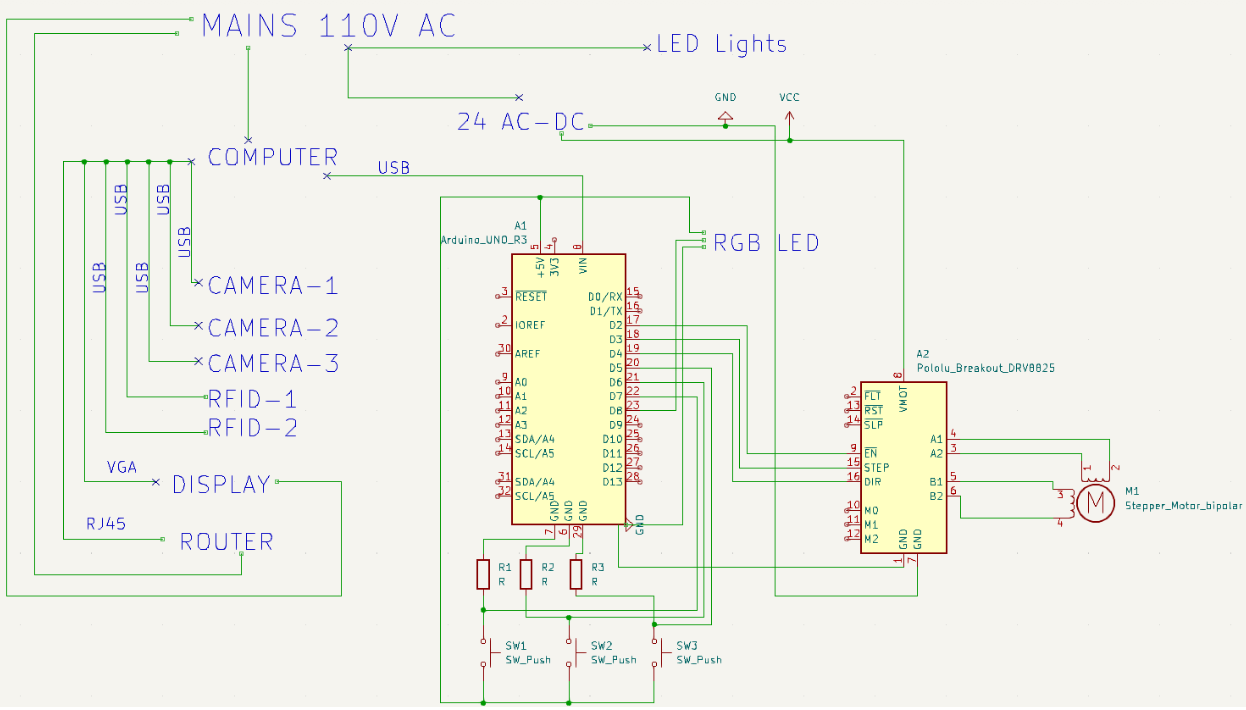
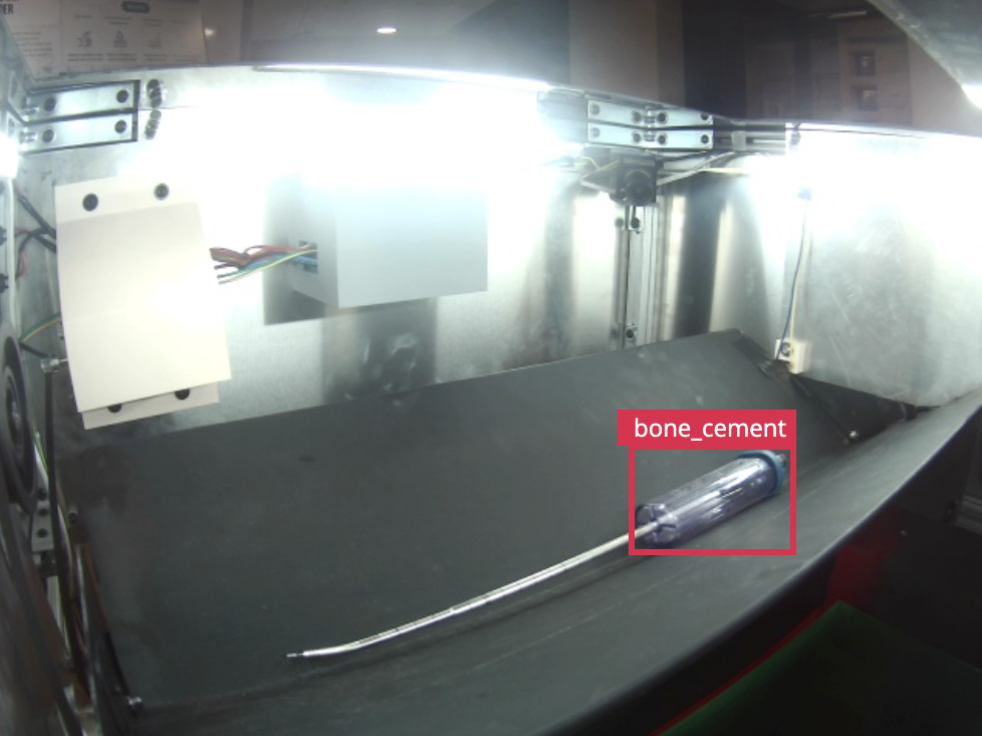
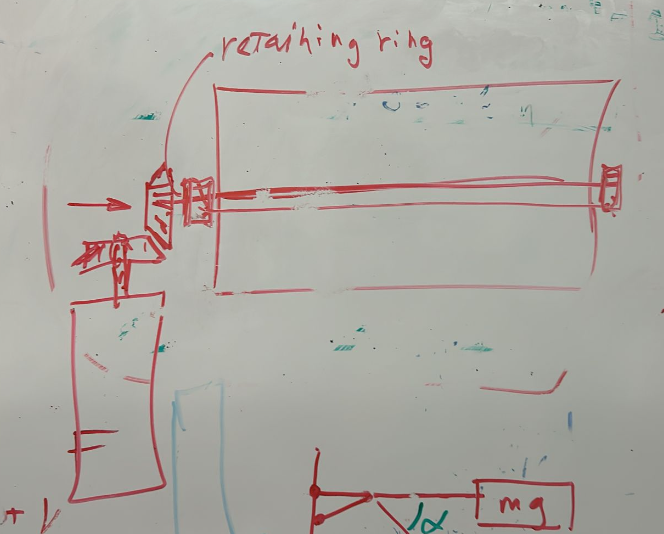
Settling on a solution took months, with multiple iterations even after committing to a sorting bin. Sketches focused heavily on the paddle wheel — our most complex element. The final Pathfinder uses an aluminum extrusion frame with sheet walls, caster wheels, and a custom riveted paddle-wheel driven by a belt transmission. Two 4K USB cameras capture device orientation, and an Arduino system coordinates the motor, cameras, LEDs, RFID reader, and database.
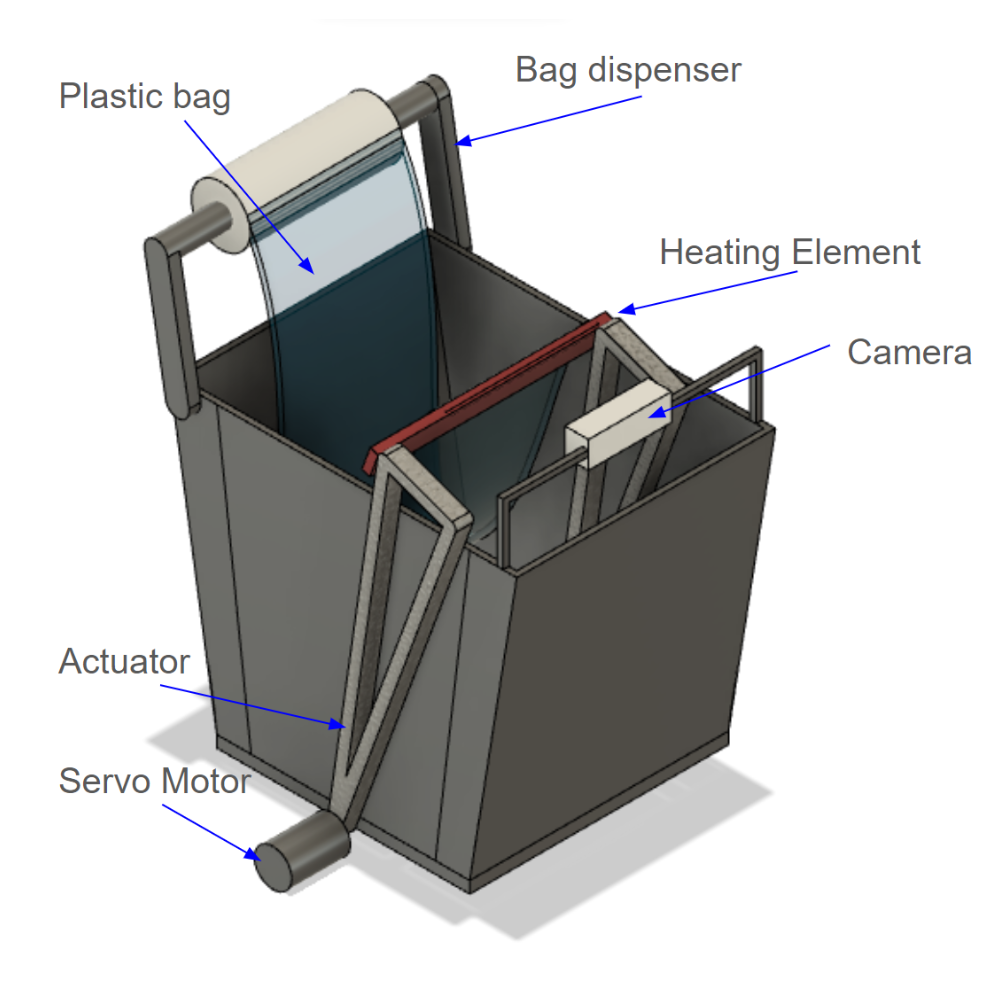
After settling on the smart bin concept, we built an initial CAD model featuring a bag dispenser, camera, heating element, and actuator. This was presented to J&J and ZHAW partners in Switzerland, where stakeholder feedback drove a pivot toward broader supply chain traceability and reduced plastic use.
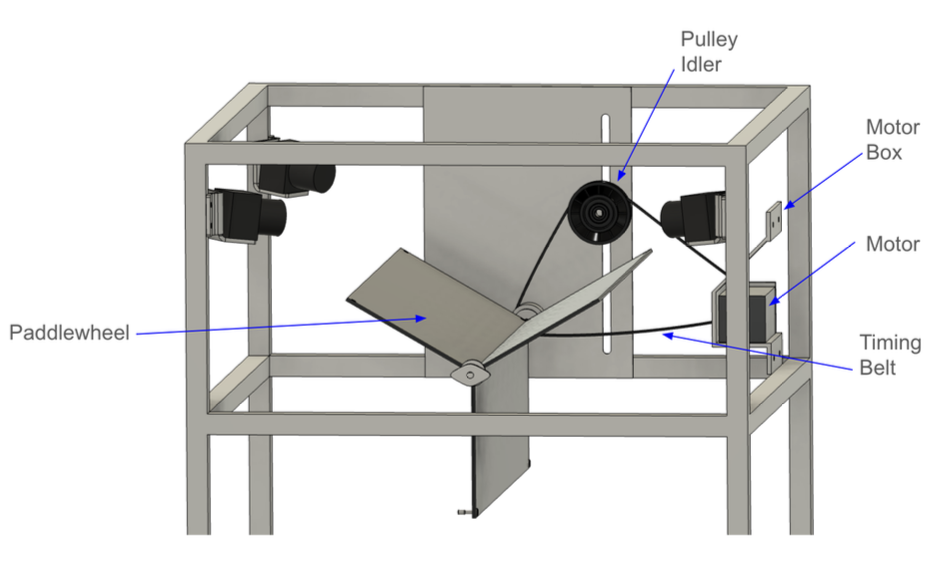
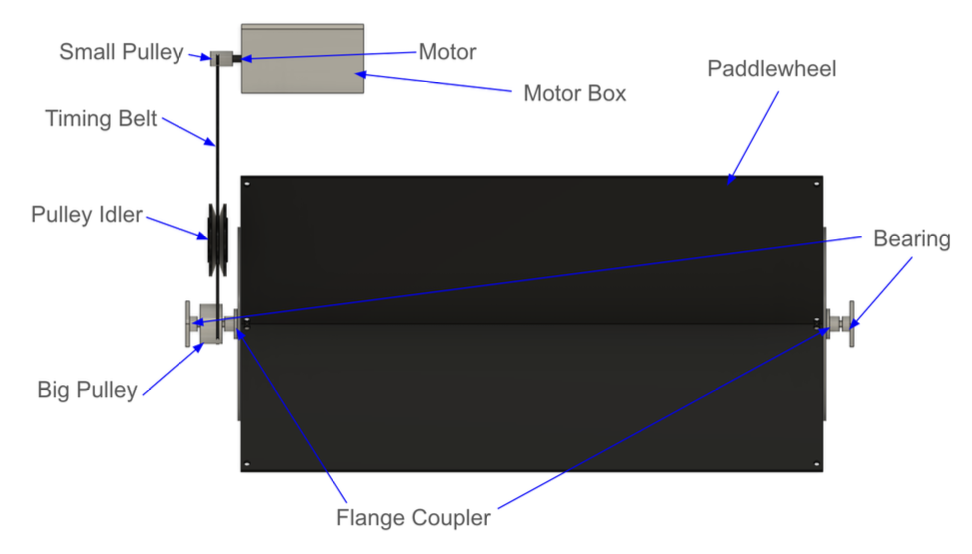
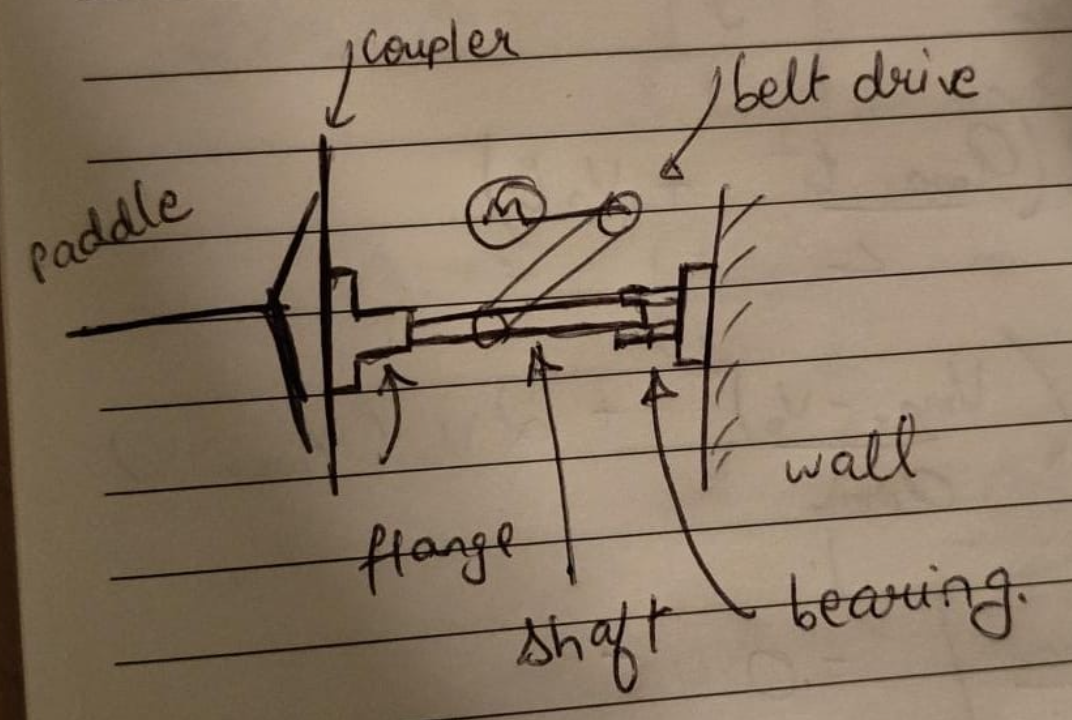
Engineering sketches compared bevel gear vs. belt transmission options for the paddle wheel. The belt transmission was chosen for its motor placement flexibility and compatibility with the Pathfinder's constrained housing.
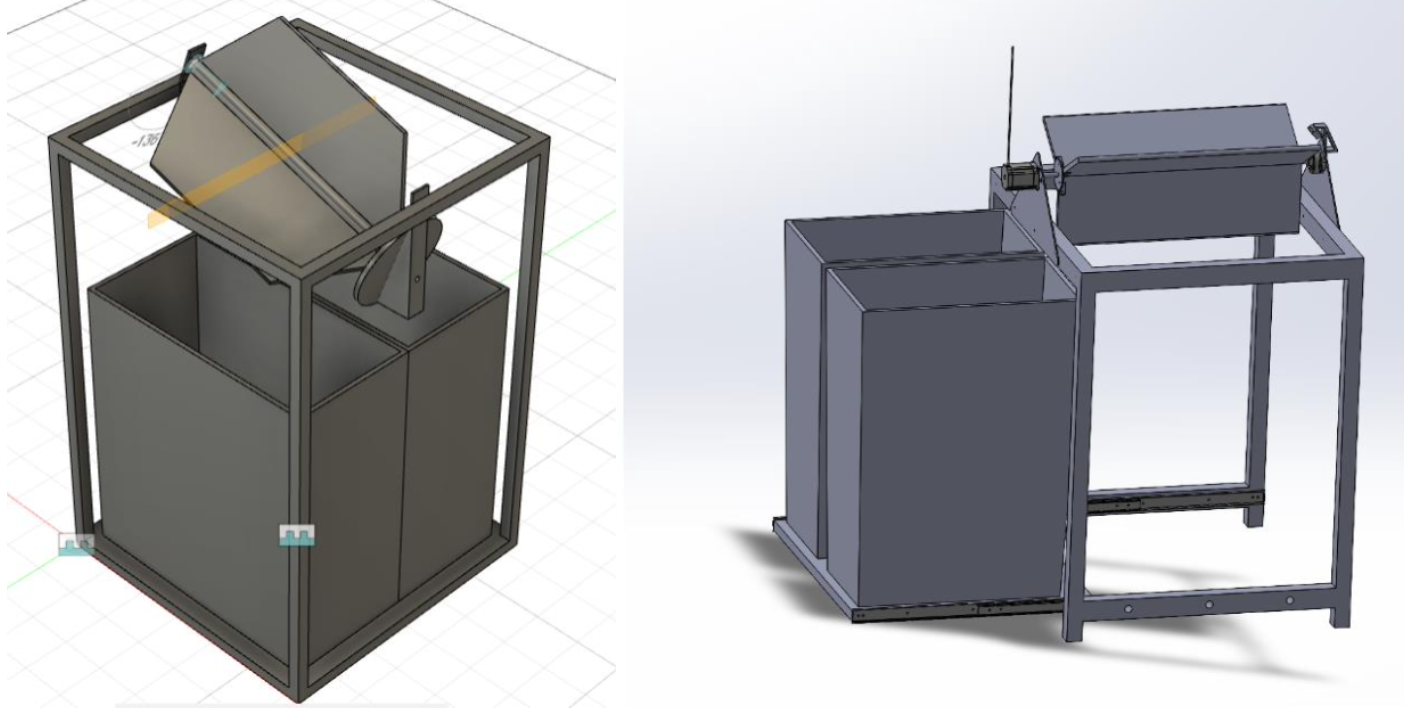
Two paddle-wheel configurations were explored in CAD — angled and upright. A quick functional prototype revealed the stapler caught on the bin rim. Feedback from Swiss partners also flagged inconsistent bin sizing across ORs, leading to a lengthened frame for better downstream integration.
I was responsible for the final CAD.